Model¶
PyEPO supports end-to-end predict-then-optimize with linear objective functions and unknown cost coefficients. At its core is the differentiable optimization solver, which computes gradients of the loss with respect to the cost coefficients.
optModel is the base abstraction in PyEPO. It wraps an optimization solver or algorithm with a unified interface for training and evaluation. PyEPO provides several pre-defined models using GurobiPy, COPT, Pyomo, OR-Tools, and MPAX:
Shortest path (GurobiPy, COPT, Pyomo, OR-Tools & MPAX)
Knapsack (GurobiPy, COPT, Pyomo, OR-Tools & MPAX)
Traveling salesperson (GurobiPy, COPT & Pyomo)
Capacitated vehicle routing (GurobiPy, COPT & Pyomo)
Portfolio optimization (GurobiPy, COPT & Pyomo)
When building models with PyEPO, users do not need to specify the cost coefficients – they are predicted from data at training time.
For more details, see the 01 Optimization Model notebook.
User-Defined Models¶
Users can define custom optimization problems with linear objective functions. PyEPO provides several ways to do this:
GurobiPy-based: Inherit from
optGrbModeland implement_getModel.COPT-based: Inherit from
optCoptModeland implement_getModel.Pyomo-based: Inherit from
optOmoModeland implement_getModel.OR-Tools-based: Inherit from
optOrtModel(pywraplp) oroptOrtCpModel(CP-SAT) and implement_getModel.MPAX-based: Inherit from
optMpaxModeland implement_getModelto populate constraint matricesself.A,self.b,self.G,self.h,self.l,self.u.From scratch: Inherit from
optModeland implement_getModel,setObj,solve, andnum_cost.
The optModel interface consists of:
_getModel: Build and return the optimization model and decision variables.setObj: Set the objective function with a given cost vector.solve: Solve the problem and return the optimal solution and objective value.num_cost: Number of cost coefficients (length of the cost vector).
User-Defined GurobiPy Models¶
To define a GurobiPy model, inherit from pyepo.model.grb.optGrbModel and implement the _getModel method. The model sense (minimize/maximize) is automatically detected from the GurobiPy model.
- class pyepo.model.grb.optGrbModel
Abstract base class for GurobiPy-backed optimization models.
Subclasses implement
_getModelto build agurobipy.Modeland return(model, variables). The objective sense is auto-detected from the underlying Gurobi model –modelSensedoes not need to be set manually. Solver output is silenced by default; cost-vector updates use the C-levelsetAttr("Obj", ...)batch path for efficiency.- Variables:
_model (gurobipy.Model) – underlying Gurobi model
- __init__() None
- abstractmethod _getModel() tuple
An abstract method to build a model from an optimization solver
- Returns:
optimization model and variables
- Return type:
- property num_cost: int
number of costs to be predicted
- relax() optModel
A method to relax the MIP model. Subclasses should override.
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
For example, consider the following binary optimization problem:
Users only need to implement the _getModel method:
import random
import gurobipy as gp
from gurobipy import GRB
from pyepo.model.grb import optGrbModel
class myModel(optGrbModel):
def _getModel(self):
# create a model
m = gp.Model()
# variables
x = m.addVars(5, name="x", vtype=GRB.BINARY)
# model sense
m.modelSense = GRB.MAXIMIZE
# constraints
m.addConstr(3 * x[0] + 4 * x[1] + 3 * x[2] + 6 * x[3] + 4 * x[4] <= 12)
m.addConstr(4 * x[0] + 5 * x[1] + 2 * x[2] + 3 * x[3] + 5 * x[4] <= 10)
m.addConstr(5 * x[0] + 4 * x[1] + 6 * x[2] + 2 * x[3] + 3 * x[4] <= 15)
return m, x
myoptmodel = myModel()
cost = [random.random() for _ in range(myoptmodel.num_cost)] # random cost vector
myoptmodel.setObj(cost) # set objective function
myoptmodel.solve() # solve
User-Defined COPT Models¶
To define a COPT model, inherit from pyepo.model.copt.optCoptModel and implement the _getModel method. The model sense (minimize/maximize) is automatically detected from the COPT model.
- class pyepo.model.copt.optCoptModel
Abstract base class for Cardinal Optimizer (COPT) backed models.
Subclasses implement
_getModelto build a COPTModeland return(model, variables). The objective sense is auto-detected from the underlying COPT model (no need to setmodelSensemanually); solver logging is silenced by default. Cost-vector updates use the C-levelsetInfo("Obj", ...)batch path for efficiency. A process-local COPTEnvrsingleton is reused across instances to avoid re-booting the license and worker threads on every model build.- Variables:
_model (coptpy.Model) – underlying COPT model
- __init__() None
- abstractmethod _getModel() tuple
An abstract method to build a model from an optimization solver
- Returns:
optimization model and variables
- Return type:
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
Here is the same problem implemented with COPT:
import random
from coptpy import Envr, COPT
from pyepo.model.copt import optCoptModel
class myModel(optCoptModel):
def _getModel(self):
# create a model
m = Envr().createModel()
# variables
x = m.addVars(range(5), vtype=COPT.BINARY)
# model sense
m.setObjSense(COPT.MAXIMIZE)
# constraints
m.addConstr(3 * x[0] + 4 * x[1] + 3 * x[2] + 6 * x[3] + 4 * x[4] <= 12)
m.addConstr(4 * x[0] + 5 * x[1] + 2 * x[2] + 3 * x[3] + 5 * x[4] <= 10)
m.addConstr(5 * x[0] + 4 * x[1] + 6 * x[2] + 2 * x[3] + 3 * x[4] <= 15)
return m, x
myoptmodel = myModel()
cost = [random.random() for _ in range(myoptmodel.num_cost)] # random cost vector
myoptmodel.setObj(cost) # set objective function
myoptmodel.solve() # solve
User-Defined Pyomo Models¶
To define a Pyomo model, inherit from pyepo.model.omo.optOmoModel and implement the _getModel method.
- class pyepo.model.omo.optOmoModel(solver: str = 'glpk')
Abstract base class for Pyomo-backed optimization models.
Subclasses implement
_getModelto build a PyomoConcreteModeland return(model, variables). UnlikeoptGrbModel, the objective sense is not detected automatically – setself.modelSense = EPO.MAXIMIZEin_getModelfor maximization problems (default is minimization). The cost vector is wired into the model as a mutableParamso thatsetObjonly updates parameter values rather than rebuilding the objective expression.Any solver supported by Pyomo can be plugged in via the
solverargument (e.g.,"glpk","gurobi","cbc").- Variables:
_model (pyomo.ConcreteModel) – underlying Pyomo model
solver (str) – name of the Pyomo solver backend
- __init__(solver: str = 'glpk') None
- Parameters:
solver – name of the Pyomo solver backend (e.g.
"glpk","gurobi")
- abstractmethod _getModel() tuple
An abstract method to build a model from an optimization solver
- Returns:
optimization model and variables
- Return type:
- property num_cost: int
number of costs to be predicted
- relax() optModel
A method to relax the MIP model. Subclasses should override.
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
Warning
Unlike optGrbModel, optOmoModel requires explicitly setting modelSense in _getModel.
Here is the same problem implemented with Pyomo:
import random
from pyomo import environ as pe
from pyepo.model.omo import optOmoModel
from pyepo import EPO
class myModel(optOmoModel):
def _getModel(self):
# sense
self.modelSense = EPO.MAXIMIZE
# create a model
m = pe.ConcreteModel()
# variables
x = pe.Var([0,1,2,3,4], domain=pe.Binary)
m.x = x
# constraints
m.cons = pe.ConstraintList()
m.cons.add(3 * x[0] + 4 * x[1] + 3 * x[2] + 6 * x[3] + 4 * x[4] <= 12)
m.cons.add(4 * x[0] + 5 * x[1] + 2 * x[2] + 3 * x[3] + 5 * x[4] <= 10)
m.cons.add(5 * x[0] + 4 * x[1] + 6 * x[2] + 2 * x[3] + 3 * x[4] <= 15)
return m, x
myoptmodel = myModel(solver="gurobi")
cost = [random.random() for _ in range(myoptmodel.num_cost)] # random cost vector
myoptmodel.setObj(cost) # set objective function
myoptmodel.solve() # solve
User-Defined OR-Tools Models¶
OR-Tools provides two solving paradigms: pywraplp (LP/MIP solvers) and CP-SAT (constraint programming). PyEPO provides base classes for both.
pywraplp – Inherit from pyepo.model.ort.optOrtModel and implement _getModel. The solver parameter selects the backend (e.g., "scip", "glop", "cbc").
- class pyepo.model.ort.optOrtModel(solver: str = 'scip')
Abstract base class for OR-Tools pywraplp (LP/MIP) models.
Subclasses implement
_getModelto build apywraplp.Solverand return(model, variables). UnlikeoptGrbModel, the objective sense is not detected automatically – setself.modelSense = EPO.MAXIMIZEin_getModelfor maximization problems (default is minimization). Solver output is silenced by default. The backend solver is selected at construction time via thesolverargument (e.g.,"scip","glop","cbc").- Variables:
_model (pywraplp.Solver) – underlying OR-Tools linear solver
solver (str) – pywraplp backend name
- __init__(solver: str = 'scip') None
- Parameters:
solver – pywraplp backend (e.g.
"scip","glop","cbc")
- abstractmethod _getModel() tuple
An abstract method to build a model from an optimization solver
- Returns:
optimization model and variables
- Return type:
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
Warning
Unlike optGrbModel, optOrtModel requires explicitly setting modelSense in _getModel.
import random
from ortools.linear_solver import pywraplp
from pyepo.model.ort import optOrtModel
from pyepo import EPO
class myModel(optOrtModel):
def _getModel(self):
# sense
self.modelSense = EPO.MAXIMIZE
# create a model
m = pywraplp.Solver.CreateSolver("SCIP")
# variables
x = {i: m.BoolVar(f"x_{i}") for i in range(5)}
# constraints
m.Add(3 * x[0] + 4 * x[1] + 3 * x[2] + 6 * x[3] + 4 * x[4] <= 12)
m.Add(4 * x[0] + 5 * x[1] + 2 * x[2] + 3 * x[3] + 5 * x[4] <= 10)
m.Add(5 * x[0] + 4 * x[1] + 6 * x[2] + 2 * x[3] + 3 * x[4] <= 15)
return m, x
myoptmodel = myModel(solver="scip")
cost = [random.random() for _ in range(myoptmodel.num_cost)] # random cost vector
myoptmodel.setObj(cost) # set objective function
myoptmodel.solve() # solve
CP-SAT – Inherit from pyepo.model.ort.optOrtCpModel and implement _getModel. CP-SAT is an integer-only solver; float cost vectors are automatically scaled internally.
- class pyepo.model.ort.optOrtCpModel
Abstract base class for OR-Tools CP-SAT (constraint programming) models.
Subclasses implement
_getModelto build acp_model.CpModeland return(model, variables). CP-SAT is an integer-only solver, so float cost vectors are scaled internally (multiplied by_OBJ_SCALEand cast to int) before being passed to the solver; the objective value returned bysolveis rescaled back to the original units.As with the other non-Gurobi/non-COPT backends,
modelSenseis not auto-detected – setself.modelSense = EPO.MAXIMIZEin_getModelfor maximization (default is minimization). CP-SAT does not support LP relaxation, sorelax()raisesRuntimeError.- Variables:
_model (cp_model.CpModel) – underlying OR-Tools CP-SAT model
- __init__() None
- abstractmethod _getModel() tuple
An abstract method to build a model from an optimization solver
- Returns:
optimization model and variables
- Return type:
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
from ortools.sat.python import cp_model
from pyepo.model.ort import optOrtCpModel
from pyepo import EPO
class myCpModel(optOrtCpModel):
def _getModel(self):
# sense
self.modelSense = EPO.MAXIMIZE
# create a model
m = cp_model.CpModel()
# variables
x = {i: m.NewBoolVar(f"x_{i}") for i in range(5)}
# constraints (integer coefficients)
m.Add(3 * x[0] + 4 * x[1] + 3 * x[2] + 6 * x[3] + 4 * x[4] <= 12)
m.Add(4 * x[0] + 5 * x[1] + 2 * x[2] + 3 * x[3] + 5 * x[4] <= 10)
m.Add(5 * x[0] + 4 * x[1] + 6 * x[2] + 2 * x[3] + 3 * x[4] <= 15)
return m, x
myoptmodel = myCpModel()
Note
CP-SAT does not support LP relaxation. Calling relax() will raise a RuntimeError.
User-Defined MPAX Models¶
MPAX (Mathematical Programming in JAX) is a hardware-accelerated mathematical programming framework based on the PDHG (Primal-Dual Hybrid Gradient) algorithm, designed for large-scale linear and quadratic programs.
For a runnable walkthrough that batch-solves LPs on GPU end-to-end with MPAX, see the 09 Solving on MPAX with PDHG notebook.
To define an MPAX model, inherit from pyepo.model.mpax.optMpaxModel and populate the constraint matrices inside _getModel:
self.A,self.b: Equality constraints \(Ax = b\). Usejnp.zeros((0, n))/jnp.zeros((0,))for none.
self.G,self.h: Inequality constraints \(Gx \geq h\). Usejnp.zeros((0, n))/jnp.zeros((0,))for none.
self.l: Lower bounds (typically zeros for non-negative variables).
self.u: Upper bounds (usejnp.full(n, jnp.inf)for unbounded).
self.Q(optional): PSD quadratic-objective matrix for the QP path; defaultNonekeeps the LP path.
_getModel returns (None, []) – MPAX has no explicit model object; the matrices are the model. Additional knobs:
Sparse vs dense: override the class attribute
use_sparse_matrix(defaultTrue).Model sense: set
self.modelSense = EPO.MAXIMIZEin_getModelor__init__for a maximization problem; defaults to minimization.LP vs QP: leave
self.Q = None(default) for an LP routed throughcreate_lp; assign a PSD matrix to switch to a convex QP with objective \(\tfrac{1}{2} x^\top Q x + c^\top x\) routed throughcreate_qp. Constraints stay linear – MPAX only supports a quadratic objective.MAXIMIZEwith a PSDQis non-convex and rejected at construction; reformulate asMINIMIZEof the negated objective.
- class pyepo.model.mpax.optMpaxModel
Abstract base class for MPAX-backed (JAX) linear / quadratic program models.
MPAX is a JAX implementation of the PDHG (Primal-Dual Hybrid Gradient) first-order solver, designed for large-scale continuous programs that benefit from GPU acceleration and vmap-batched solving. Unlike the Gurobi / COPT / Pyomo / OR-Tools backends, an MPAX model has no explicit solver model object – the constraint matrices and bounds are the model. Subclasses populate them inside
_getModeland return(None, []):def _getModel(self): self.A = jnp.array(...) # equality A x = b self.b = jnp.array(...) self.G = jnp.array(...) # inequality G x >= h self.h = jnp.array(...) self.l = jnp.array(...) # variable lower bound self.u = jnp.array(...) # variable upper bound # optional: leave None for LP, set for convex QP self.Q = jnp.array(...) # PSD; objective is 0.5 xᵀQx + cᵀx return None, []
LP vs QP is selected automatically from
self.Q:None(default) keeps the LP code path viacreate_lp, any other value routes throughcreate_qp.Qmust be PSD; MPAX supports quadratic objective only – constraints stay linear (this is a hard MPAX limit; e.g. a quadratic risk-budget constraint cannot be expressed).Objective sense follows
self.modelSense(set by a problem-level base such asknapsackBaseor directly in_getModel; defaults to minimization). Dense vs sparse matrices can be toggled by overriding the class attributeuse_sparse_matrix(defaultTrue).A jitted single-instance solver and a
vmap-batched solver (batch_optimize) are pre-compiled on construction, sooptDatasetcan solve every training instance in a single dispatch.- Variables:
A (jnp.ndarray) – equality-constraint matrix (Ax = b)
b (jnp.ndarray) – equality-constraint right-hand side
G (jnp.ndarray) – inequality-constraint matrix (Gx >= h)
h (jnp.ndarray) – inequality-constraint right-hand side
l (jnp.ndarray) – variable lower bounds
u (jnp.ndarray) – variable upper bounds
Q (jnp.ndarray | None) – PSD quadratic-objective matrix;
None⇒ LPuse_sparse_matrix (bool) – whether to use sparse matrices
- __init__() None
- abstractmethod _getModel() tuple
An abstract method to build a model from an optimization solver
- Returns:
optimization model and variables
- Return type:
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
import jax.numpy as jnp
from pyepo.model.mpax import optMpaxModel
class myLpModel(optMpaxModel):
use_sparse_matrix = False # dense matrices
def _getModel(self):
n = 5 # number of variables
# equality A x = b
self.A = jnp.array([[1.0, 1.0, 1.0, 1.0, 1.0]])
self.b = jnp.array([2.0])
# inequality G x >= h
self.G = jnp.array([[1.0, 0.0, 1.0, 0.0, 1.0]])
self.h = jnp.array([1.0])
# variable bounds x in [0, 1]
self.l = jnp.zeros(n, dtype=jnp.float32)
self.u = jnp.ones(n, dtype=jnp.float32)
return None, []
optmodel = myLpModel()
cost = [0.1, 0.4, 0.2, 0.3, 0.5]
optmodel.setObj(cost) # set objective function
optmodel.solve() # solve
For a QP, additionally assign self.Q to a PSD matrix; the same setObj / solve / batch_optimize interface then minimizes \(\tfrac{1}{2} x^\top Q x + c^\top x\):
import jax.numpy as jnp
from pyepo.model.mpax import optMpaxModel
class myQpModel(optMpaxModel):
use_sparse_matrix = False
def _getModel(self):
n = 4
# no equality
self.A = jnp.zeros((0, n), dtype=jnp.float32)
self.b = jnp.zeros((0,), dtype=jnp.float32)
# slack inequality so PDHG has a non-empty dual block
self.G = jnp.ones((1, n), dtype=jnp.float32)
self.h = jnp.array([-1000.0], dtype=jnp.float32)
# box bounds
self.l = jnp.full(n, -10.0, dtype=jnp.float32)
self.u = jnp.full(n, 10.0, dtype=jnp.float32)
# PSD quadratic objective -> routes to create_qp
self.Q = jnp.diag(jnp.array([2.0, 4.0, 6.0, 8.0], dtype=jnp.float32))
return None, []
optmodel = myQpModel()
optmodel.setObj([-2.0, -4.0, -6.0, -8.0])
optmodel.solve()
User-Defined Models from Scratch¶
For complete flexibility, inherit directly from pyepo.model.opt.optModel to integrate any solver or algorithm. Override _getModel, setObj, solve, and num_cost to provide the same interface as the built-in model wrappers.
- class pyepo.model.opt.optModel
Abstract base class for predict-then-optimize models.
Subclasses wrap an optimization solver or algorithm with a unified
_getModel/setObj/solve/num_costinterface thatpyepo.funcmodules call during training. Concrete backends are provided for GurobiPy (optGrbModel), Pyomo (optOmoModel), COPT (optCoptModel), OR-Tools (optOrtModel/optOrtCpModel), and MPAX (optMpaxModel); subclassoptModeldirectly to integrate any other solver or algorithm.The default objective sense is minimization; set
self.modelSense = EPO.MAXIMIZEin_getModelor__init__for maximization problems (some backends, e.g. Gurobi and COPT, detect this automatically from the underlying solver model).- Variables:
_model (optimization model) – underlying solver model object
modelSense (ModelSense) – EPO.MINIMIZE (default) or EPO.MAXIMIZE
- __init__() None
- abstractmethod _getModel() tuple
An abstract method to build a model from an optimization solver
- Returns:
optimization model and variables
- Return type:
- property num_cost: int
number of costs to be predicted
- abstractmethod setObj(c: np.ndarray | torch.Tensor | list) None
An abstract method to set the objective function
- Parameters:
c – cost of objective function
- abstractmethod solve() tuple[np.ndarray | torch.Tensor | list, float]
An abstract method to solve the model
- Returns:
optimal solution (list) and objective value (float)
- Return type:
Note
For maximization problems, set self.modelSense = EPO.MAXIMIZE in __init__ or _getModel. Otherwise the default is minimization.
The following example uses networkx with the Dijkstra algorithm to solve a shortest path problem:
import random
import numpy as np
import networkx as nx
from pyepo.model.opt import optModel
class myShortestPathModel(optModel):
def __init__(self, grid):
"""
Args:
grid (tuple): size of grid network
"""
self.grid = grid
self.arcs = self._getArcs()
super().__init__()
def _getArcs(self):
"""
A method to get list of arcs for grid network
Returns:
list: arcs
"""
arcs = []
for i in range(self.grid[0]):
# edges on rows
for j in range(self.grid[1] - 1):
v = i * self.grid[1] + j
arcs.append((v, v + 1))
# edges in columns
if i == self.grid[0] - 1:
continue
for j in range(self.grid[1]):
v = i * self.grid[1] + j
arcs.append((v, v + self.grid[1]))
return arcs
def _getModel(self):
"""
A method to build model
Returns:
tuple: optimization model and variables
"""
# build graph as optimization model
g = nx.Graph()
# add arcs as variables
g.add_edges_from(self.arcs, cost=0)
return g, g.edges
def setObj(self, c):
"""
A method to set objective function
Args:
c (ndarray): cost of objective function
"""
for i, e in enumerate(self.arcs):
self._model.edges[e]["cost"] = c[i]
def solve(self):
"""
A method to solve model
Returns:
tuple: optimal solution (list) and objective value (float)
"""
# dijkstra
path = nx.shortest_path(self._model, weight="cost", source=0, target=self.grid[0]*self.grid[1]-1)
# convert path into active edges
edges = []
u = 0
for v in path[1:]:
edges.append((u,v))
u = v
# init sol & obj
sol = np.zeros(self.num_cost)
obj = 0
# convert active edges into solution and obj
for i, e in enumerate(self.arcs):
if e in edges:
sol[i] = 1 # active edge
obj += self._model.edges[e]["cost"] # cost of active edge
return sol, obj
# solve model
grid = (5,5)
myoptmodel = myShortestPathModel(grid)
cost = [random.random() for _ in range(myoptmodel.num_cost)] # random cost vector
myoptmodel.setObj(cost) # set objective function
sol, obj = myoptmodel.solve() # solve
# print res
print('Obj: {}'.format(obj))
for i, e in enumerate(myoptmodel.arcs):
if sol[i] > 1e-3:
print(e)
Pre-Defined Models¶
PyEPO includes pre-defined models for several classic optimization problems. Each problem ships with multiple solver backends; the setObj / solve / num_cost interface is identical across them, so you can swap backends without changing the surrounding training code.
Note
In end-to-end training, setObj and solve are invoked automatically inside the pyepo.func modules. The manual setObj / solve calls shown in each example below are for illustration only.
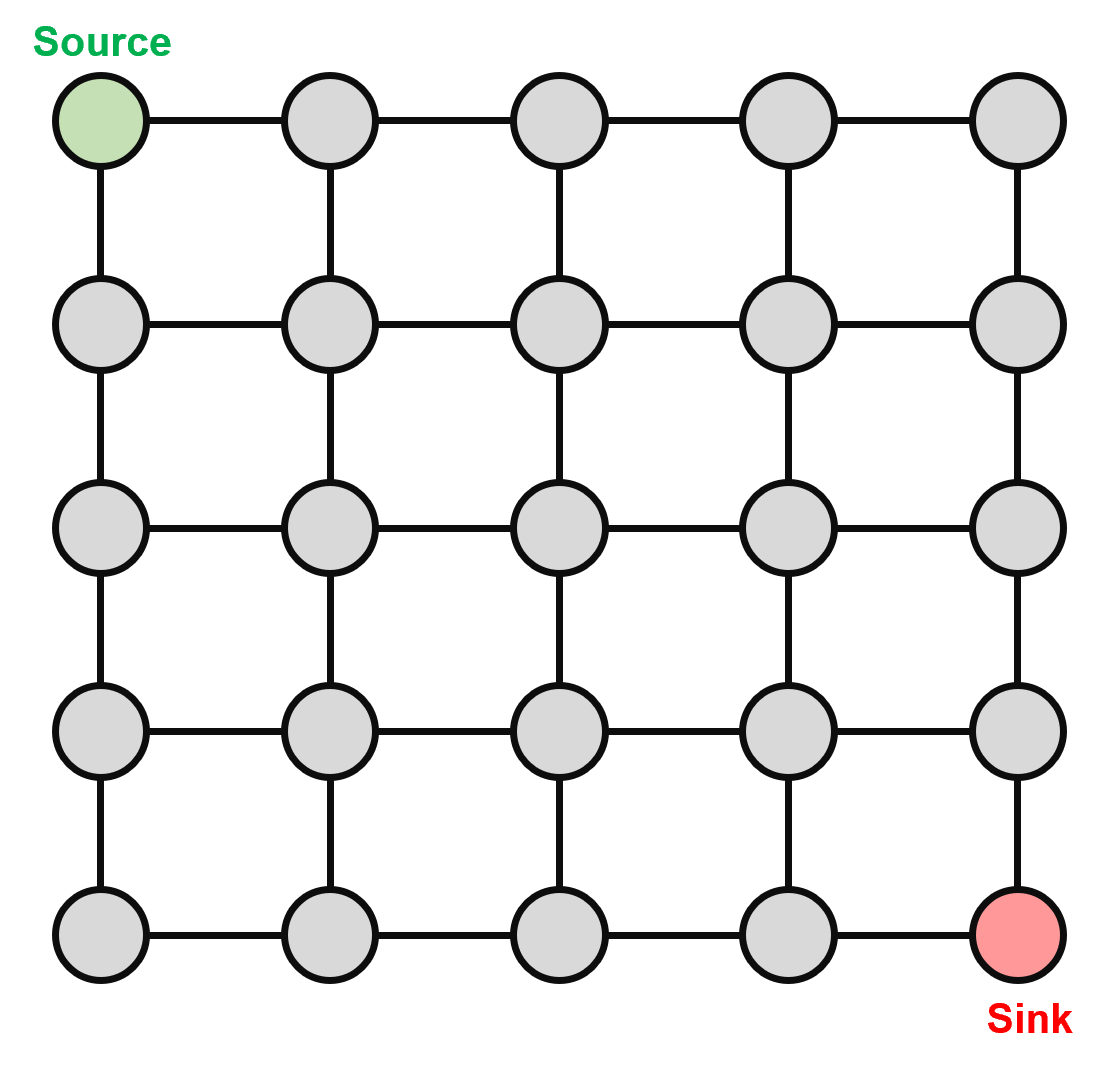
Shortest Path¶
The shortest path problem finds the minimum-cost path from the northwest corner to the southeast corner of an (h, w) grid network. The default grid size is (5, 5). The problem is formulated as a minimum cost flow linear program.
Available backends:
Backend |
Class |
Notes |
|---|---|---|
GurobiPy |
|
|
COPT |
|
|
Pyomo |
|
pick solver via |
OR-Tools (pywraplp) |
|
pick solver via |
OR-Tools (CP-SAT) |
|
constraint programming |
MPAX |
|
LP on GPU via PDHG |
- class pyepo.model.grb.shortestPathModel(grid: tuple[int, int], *args, **kwargs)
Gurobi-backed shortest path on a grid network.
- Variables:
- __init__(grid: tuple[int, int], *args, **kwargs) None
- Parameters:
grid – grid dimensions
(rows, cols)
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
- class pyepo.model.copt.shortestPathModel(grid: tuple[int, int], *args, **kwargs)
COPT-backed shortest path on a grid network.
- Variables:
- __init__(grid: tuple[int, int], *args, **kwargs) None
- Parameters:
grid – grid dimensions
(rows, cols)
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
- class pyepo.model.omo.shortestPathModel(grid: tuple[int, int], solver: str = 'glpk')
Pyomo-backed shortest path on a grid network.
- Variables:
- __init__(grid: tuple[int, int], solver: str = 'glpk') None
- Parameters:
grid – size of grid network
solver – optimization solver in the background
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
- class pyepo.model.ort.shortestPathModel(grid: tuple[int, int], solver: str = 'glop')
OR-Tools (pywraplp) backed shortest path on a grid network.
- Variables:
- __init__(grid: tuple[int, int], solver: str = 'glop') None
- Parameters:
grid – size of grid network
solver – solver backend for pywraplp
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
- class pyepo.model.ort.shortestPathCpModel(grid: tuple[int, int], *args, **kwargs)
OR-Tools CP-SAT backed shortest path on a grid network.
- Variables:
- __init__(grid: tuple[int, int], *args, **kwargs) None
- Parameters:
grid – grid dimensions
(rows, cols)
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
- class pyepo.model.mpax.shortestPathModel(grid: tuple[int, int], *args, **kwargs)
MPAX-backed (JAX LP) shortest path on a grid network.
- __init__(grid: tuple[int, int], *args, **kwargs) None
- Parameters:
grid – grid dimensions
(rows, cols)
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
Example:
import pyepo
import random
grid = (5, 5)
# pick a backend (default = GurobiPy)
optmodel = pyepo.model.grb.shortestPathModel(grid)
# alternatives:
# optmodel = pyepo.model.copt.shortestPathModel(grid)
# optmodel = pyepo.model.omo.shortestPathModel(grid, solver="glpk")
# optmodel = pyepo.model.ort.shortestPathModel(grid) # pywraplp, GLOP default
# optmodel = pyepo.model.ort.shortestPathCpModel(grid) # CP-SAT
# optmodel = pyepo.model.mpax.shortestPathModel(grid)
cost = [random.random() for _ in range(optmodel.num_cost)]
optmodel.setObj(cost)
sol, obj = optmodel.solve()
Knapsack¶
The multi-dimensional knapsack problem is a maximization problem: select a subset of items such that total weight does not exceed resource capacities and total value is maximized. Consider a 3-dimensional example:
The constraint coefficients weights and right-hand sides capacities define the problem.
Note
The number of dimensions and items are determined by the shape of weights and capacities.
Available backends:
Backend |
Class |
Notes |
|---|---|---|
GurobiPy |
|
supports LP relaxation via |
COPT |
|
supports |
Pyomo |
|
pick solver via |
OR-Tools (pywraplp) |
|
default solver |
OR-Tools (CP-SAT) |
|
requires integer coefficients (floats are truncated) |
MPAX |
|
solves the LP relaxation on GPU via PDHG |
- class pyepo.model.grb.knapsackModel(weights: ndarray | list, capacity: ndarray | list, *args, **kwargs)
Gurobi-backed knapsack.
- Variables:
_model (GurobiPy model) – Gurobi model
weights (np.ndarray) – Weights of items
capacity (np.ndarray) – Total capacity
items (list) – List of item index
- __init__(weights: ndarray | list, capacity: ndarray | list, *args, **kwargs) None
- Parameters:
weights – item weights with shape
(dim, n_items)capacity – per-dimension capacity with length
dim
- property num_cost: int
number of costs to be predicted
- relax() knapsackModelRel
A method to get linear relaxation model
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
- class pyepo.model.copt.knapsackModel(weights: ndarray | list, capacity: ndarray | list, *args, **kwargs)
COPT-backed knapsack.
- Variables:
_model (COPT model) – COPT model
weights (np.ndarray) – weights of items
capacity (np.ndarray) – total capacity
items (list) – list of item index
- __init__(weights: ndarray | list, capacity: ndarray | list, *args, **kwargs) None
- Parameters:
weights – item weights with shape
(dim, n_items)capacity – per-dimension capacity with length
dim
- property num_cost: int
number of costs to be predicted
- relax() knapsackModelRel
A method to get linear relaxation model
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
- class pyepo.model.omo.knapsackModel(weights: ndarray | list, capacity: ndarray | list, solver: str = 'glpk')
Pyomo-backed knapsack.
- Variables:
- __init__(weights: ndarray | list, capacity: ndarray | list, solver: str = 'glpk') None
- Parameters:
weights – weights of items
capacity – total capacity
solver – optimization solver in the background
- property num_cost: int
number of costs to be predicted
- relax() knapsackModelRel
A method to get linear relaxation model
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
- class pyepo.model.ort.knapsackModel(weights: ndarray | list, capacity: ndarray | list, *args, **kwargs)
OR-Tools (pywraplp) backed knapsack.
- Variables:
- __init__(weights: ndarray | list, capacity: ndarray | list, *args, **kwargs) None
- Parameters:
weights – item weights with shape
(dim, n_items)capacity – per-dimension capacity with length
dim
- property num_cost: int
number of costs to be predicted
- relax() knapsackModelRel
A method to get linear relaxation model
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
- class pyepo.model.ort.knapsackCpModel(weights: ndarray | list, capacity: ndarray | list, *args, **kwargs)
OR-Tools CP-SAT backed knapsack.
- Variables:
_model (cp_model.CpModel) – OR-Tools CP-SAT model
weights (np.ndarray) – weights of items
capacity (np.ndarray) – total capacity
items (list) – list of item index
- __init__(weights: ndarray | list, capacity: ndarray | list, *args, **kwargs) None
- Parameters:
weights – item weights with shape
(dim, n_items)capacity – per-dimension capacity with length
dim
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
- class pyepo.model.mpax.knapsackModel(weights: ndarray | list, capacity: ndarray | list, *args, **kwargs)
MPAX-backed (JAX LP) knapsack — LP relaxation.
- Variables:
_model – MPAX model
weights (np.ndarray) – Weights of items
capacity (np.ndarray) – Total capacity
items (list) – List of item index
- __init__(weights: ndarray | list, capacity: ndarray | list, *args, **kwargs) None
- Parameters:
weights – item weights with shape
(dim, n_items)capacity – per-dimension capacity with length
dim
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
Example:
import pyepo
import random
weights = [[3, 4, 3, 6, 4],
[4, 5, 2, 3, 5],
[5, 4, 6, 2, 3]] # constraint coefficients
capacities = [12, 10, 15] # constraint right-hand sides
# pick a backend (default = GurobiPy)
optmodel = pyepo.model.grb.knapsackModel(weights, capacities)
# alternatives:
# optmodel = pyepo.model.copt.knapsackModel(weights, capacities)
# optmodel = pyepo.model.omo.knapsackModel(weights, capacities, solver="glpk")
# optmodel = pyepo.model.ort.knapsackModel(weights, capacities) # pywraplp
# optmodel = pyepo.model.ort.knapsackCpModel(weights, capacities) # CP-SAT
# import numpy as np
# optmodel = pyepo.model.mpax.knapsackModel(np.array(weights), capacities)
cost = [random.random() for _ in range(optmodel.num_cost)]
optmodel.setObj(cost)
sol, obj = optmodel.solve()
# LP relaxation (unavailable for CP-SAT and MPAX backends)
optmodel_rel = optmodel.relax()
Traveling Salesperson¶
The traveling salesperson problem (TSP) seeks the shortest route that visits each city exactly once and returns to the origin. We consider the symmetric TSP with 20 nodes.
Three ILP formulations are available: Dantzig-Fulkerson-Johnson (DFJ), Gavish-Graves (GG), and Miller-Tucker-Zemlin (MTZ).
Available formulations and backends:
Formulation |
Backend |
Class |
Notes |
|---|---|---|---|
DFJ |
GurobiPy |
|
lazy subtour-elimination constraints; no |
DFJ |
COPT |
|
lazy subtour-elimination constraints; no |
GG |
GurobiPy |
|
supports |
GG |
COPT |
|
supports |
GG |
Pyomo |
|
supports |
MTZ |
GurobiPy |
|
supports |
MTZ |
COPT |
|
supports |
MTZ |
Pyomo |
|
supports |
Note
DFJ relies on solver callbacks and is therefore unavailable in Pyomo. It also has exponentially many subtour-elimination constraints and does not support LP relaxation.
- class pyepo.model.grb.tspDFJModel(num_nodes: int, *args, **kwargs)
Danzig-Fulkerson-Johnson (DFJ) formulation with lazy subtour elimination.
Uses one undirected Var per edge (
x[j,i]aliasesx[i,j]), so the paired-varssetObj/solve/_addExtraConstrinherited fromtspABModelare overridden here.- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost vector
- class pyepo.model.grb.tspGGModel(num_nodes: int, *args, **kwargs)
Gavish-Graves (GG) formulation.
- property num_cost: int
number of costs to be predicted
- relax() tspGGModelRel
A method to get linear relaxation model
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost vector
- class pyepo.model.grb.tspMTZModel(num_nodes: int, *args, **kwargs)
Miller-Tucker-Zemlin (MTZ) formulation.
- property num_cost: int
number of costs to be predicted
- relax() tspMTZModelRel
A method to get linear relaxation model
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost vector
- class pyepo.model.copt.tspDFJModel(num_nodes: int, *args, **kwargs)
Danzig-Fulkerson-Johnson (DFJ) formulation with lazy subtour elimination.
Uses one undirected Var per edge, so the paired-vars
setObj/solve/_addExtraConstrinherited fromtspABModelare overridden here.- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost vector
- class pyepo.model.copt.tspGGModel(num_nodes: int, *args, **kwargs)
Gavish-Graves (GG) formulation.
- property num_cost: int
number of costs to be predicted
- relax() tspGGModelRel
A method to get linear relaxation model
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost vector
- class pyepo.model.copt.tspMTZModel(num_nodes: int, *args, **kwargs)
Miller-Tucker-Zemlin (MTZ) formulation.
- property num_cost: int
number of costs to be predicted
- relax() tspMTZModelRel
A method to get linear relaxation model
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost vector
- class pyepo.model.omo.tspGGModel(num_nodes: int, solver: str = 'glpk')
Gavish-Graves (GG) formulation.
- __init__(num_nodes: int, solver: str = 'glpk') None
- Parameters:
num_nodes – number of nodes
solver – optimization solver in the background
- property num_cost: int
number of costs to be predicted
- relax() tspGGModelRel
A method to get linear relaxation model
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
- class pyepo.model.omo.tspMTZModel(num_nodes: int, solver: str = 'glpk')
Miller-Tucker-Zemlin (MTZ) formulation.
- __init__(num_nodes: int, solver: str = 'glpk') None
- Parameters:
num_nodes – number of nodes
solver – optimization solver in the background
- property num_cost: int
number of costs to be predicted
- relax() tspMTZModelRel
A method to get linear relaxation model
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
Example:
import pyepo
import random
num_nodes = 20
# pick a formulation × backend (default = GurobiPy DFJ)
optmodel = pyepo.model.grb.tspDFJModel(num_nodes)
# alternatives:
# optmodel = pyepo.model.grb.tspGGModel(num_nodes)
# optmodel = pyepo.model.grb.tspMTZModel(num_nodes)
# optmodel = pyepo.model.copt.tspDFJModel(num_nodes)
# optmodel = pyepo.model.copt.tspGGModel(num_nodes)
# optmodel = pyepo.model.copt.tspMTZModel(num_nodes)
# optmodel = pyepo.model.omo.tspGGModel(num_nodes, solver="gurobi")
# optmodel = pyepo.model.omo.tspMTZModel(num_nodes, solver="glpk")
cost = [random.random() for _ in range(optmodel.num_cost)]
optmodel.setObj(cost)
sol, obj = optmodel.solve()
Capacitated Vehicle Routing¶
The capacitated vehicle routing problem (CVRP) seeks the shortest set of vehicle routes that serves every customer exactly once and respects per-vehicle capacity. Each route starts and ends at the depot (node 0), and the depot has degree \(2 k\) where \(k\) is the number of routes used.
Two ILP formulations are available:
Rounded Capacity Inequalities (RCI): undirected 2-degree formulation with lazy rounded-capacity cuts. Requires solver callbacks.
Miller-Tucker-Zemlin (MTZ): directed formulation with per-node load auxiliaries; no callbacks required.
Note
Single-customer routes are excluded so that all edge variables stay strictly binary. If a single-stop route is genuinely required, duplicate the depot node.
Available formulations and backends:
Formulation |
Backend |
Class |
Notes |
|---|---|---|---|
RCI |
GurobiPy |
|
lazy rounded-capacity cuts |
RCI |
COPT |
|
lazy rounded-capacity cuts |
MTZ |
GurobiPy |
|
supports |
MTZ |
COPT |
|
supports |
MTZ |
Pyomo |
|
supports |
Note
Pyomo lacks a native callback API, so only the MTZ formulation is provided.
- class pyepo.model.grb.vrpRCIModel(num_nodes: int, demands: list[float] | ndarray, capacity: float, num_vehicle: int)
CVRP formulation with 2-degree constraints and lazy rounded-capacity cuts.
Uses one undirected Var per edge (
x[j,i]aliasesx[i,j]). Subtour elimination and rounded capacity inequalities are added lazily during branch-and-cut; the cuts added at the optimum are tracked onmodel._lazy_constrsfor downstream CaVE cone extraction.- __init__(num_nodes: int, demands: list[float] | ndarray, capacity: float, num_vehicle: int) None
- Parameters:
num_nodes – number of nodes (depot is node 0)
demands – per-customer demands, length
num_nodes - 1capacity – vehicle capacity
num_vehicle – number of vehicles
- getTour(sol: np.ndarray | torch.Tensor | list) list[list[int]]
Reconstruct vehicle tours from an undirected edge-selection vector.
- Parameters:
sol – per-edge selection values aligned with
self.edges- Returns:
list of tours; each tour is a node sequence starting and ending at the depot
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost vector aligned with
self.edges
- class pyepo.model.grb.vrpMTZModel(num_nodes: int, demands: list[float] | ndarray, capacity: float, num_vehicle: int)
CVRP formulation on a directed graph with MTZ-style capacity constraints (no lazy cuts). Cost vector is per undirected edge: cost
c[k]is assigned to bothx[i,j]andx[j,i].- __init__(num_nodes: int, demands: list[float] | ndarray, capacity: float, num_vehicle: int) None
- Parameters:
num_nodes – number of nodes (depot is node 0)
demands – per-customer demands, length
num_nodes - 1capacity – vehicle capacity
num_vehicle – number of vehicles
- getTour(sol: np.ndarray | torch.Tensor | list) list[list[int]]
Reconstruct vehicle tours from an undirected edge-selection vector.
- Parameters:
sol – per-edge selection values aligned with
self.edges- Returns:
list of tours; each tour is a node sequence starting and ending at the depot
- property num_cost: int
number of costs to be predicted
- relax() vrpMTZModelRel
A method to get linear relaxation model
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost vector aligned with
self.edges(one cost per undirected edge)
- class pyepo.model.copt.vrpRCIModel(num_nodes: int, demands: list[float] | ndarray, capacity: float, num_vehicle: int)
CVRP formulation with 2-degree constraints and lazy rounded-capacity cuts.
Uses one undirected Var per edge (
x[j,i]aliasesx[i,j]). Subtour elimination and rounded capacity inequalities are added lazily during branch-and-cut via a COPT callback.- __init__(num_nodes: int, demands: list[float] | ndarray, capacity: float, num_vehicle: int) None
- Parameters:
num_nodes – number of nodes (depot is node 0)
demands – per-customer demands, length
num_nodes - 1capacity – vehicle capacity
num_vehicle – number of vehicles
- getTour(sol: np.ndarray | torch.Tensor | list) list[list[int]]
Reconstruct vehicle tours from an undirected edge-selection vector.
- Parameters:
sol – per-edge selection values aligned with
self.edges- Returns:
list of tours; each tour is a node sequence starting and ending at the depot
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost vector aligned with
self.edges
- class pyepo.model.copt.vrpMTZModel(num_nodes: int, demands: list[float] | ndarray, capacity: float, num_vehicle: int)
CVRP formulation on a directed graph with MTZ-style capacity constraints (no lazy cuts). Cost vector is per undirected edge: cost
c[k]is assigned to bothx[i,j]andx[j,i].- __init__(num_nodes: int, demands: list[float] | ndarray, capacity: float, num_vehicle: int) None
- Parameters:
num_nodes – number of nodes (depot is node 0)
demands – per-customer demands, length
num_nodes - 1capacity – vehicle capacity
num_vehicle – number of vehicles
- getTour(sol: np.ndarray | torch.Tensor | list) list[list[int]]
Reconstruct vehicle tours from an undirected edge-selection vector.
- Parameters:
sol – per-edge selection values aligned with
self.edges- Returns:
list of tours; each tour is a node sequence starting and ending at the depot
- property num_cost: int
number of costs to be predicted
- relax() vrpMTZModelRel
A method to get linear relaxation model
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost vector aligned with
self.edges(one cost per undirected edge)
- class pyepo.model.omo.vrpMTZModel(num_nodes: int, demands: list[float] | ndarray, capacity: float, num_vehicle: int, solver: str = 'glpk')
CVRP formulation on a directed graph with MTZ-style capacity constraints. Cost vector is per undirected edge: cost
c[k]is assigned to bothx[i,j]andx[j,i].- __init__(num_nodes: int, demands: list[float] | ndarray, capacity: float, num_vehicle: int, solver: str = 'glpk') None
- Parameters:
num_nodes – number of nodes (depot is node 0)
demands – per-customer demands, length
num_nodes - 1capacity – vehicle capacity
num_vehicle – number of vehicles
solver – optimization solver in the background
- getTour(sol: np.ndarray | torch.Tensor | list) list[list[int]]
Reconstruct vehicle tours from an undirected edge-selection vector.
- Parameters:
sol – per-edge selection values aligned with
self.edges- Returns:
list of tours; each tour is a node sequence starting and ending at the depot
- property num_cost: int
number of costs to be predicted
- relax() vrpMTZModelRel
A method to get linear relaxation model
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
Example:
import pyepo
num_nodes = 10 # depot + 9 customers
demands = [2, 1, 3, 2, 1, 2, 1, 3, 2]
capacity = 5.0
num_vehicle = 3
# pick a formulation × backend (default = GurobiPy RCI)
optmodel = pyepo.model.grb.vrpRCIModel(num_nodes, demands, capacity, num_vehicle)
# alternatives:
# optmodel = pyepo.model.grb.vrpMTZModel(num_nodes, demands, capacity, num_vehicle)
# optmodel = pyepo.model.copt.vrpRCIModel(num_nodes, demands, capacity, num_vehicle)
# optmodel = pyepo.model.copt.vrpMTZModel(num_nodes, demands, capacity, num_vehicle)
# optmodel = pyepo.model.omo.vrpMTZModel(num_nodes, demands, capacity, num_vehicle)
Portfolio¶
Portfolio optimization selects an asset allocation that maximizes expected return for a given level of risk:
Available backends:
Backend |
Class |
Notes |
|---|---|---|
GurobiPy |
|
|
COPT |
|
|
Pyomo |
|
pick solver via |
- class pyepo.model.grb.portfolioModel(num_assets: int, covariance: ndarray, gamma: float = 2.25, *args, **kwargs)
Gurobi-backed Markowitz portfolio.
- Variables:
_model (GurobiPy model) – Gurobi model
num_assets (int) – number of assets
covariance (numpy.ndarray) – covariance matrix of the returns
risk_level (float) – risk level
- __init__(num_assets: int, covariance: ndarray, gamma: float = 2.25, *args, **kwargs) None
- Parameters:
num_assets – number of assets
covariance – covariance matrix of the asset returns
gamma – risk tolerance multiplier on the mean covariance
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
- class pyepo.model.copt.portfolioModel(num_assets: int, covariance: ndarray, gamma: float = 2.25, *args, **kwargs)
COPT-backed Markowitz portfolio.
- Variables:
_model (COPT model) – COPT model
num_assets (int) – number of assets
covariance (numpy.ndarray) – covariance matrix of the returns
risk_level (float) – risk level
- __init__(num_assets: int, covariance: ndarray, gamma: float = 2.25, *args, **kwargs) None
- Parameters:
num_assets – number of assets
covariance – covariance matrix of the asset returns
gamma – risk tolerance multiplier on the mean covariance
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
- class pyepo.model.omo.portfolioModel(num_assets: int, covariance: np.ndarray, gamma: float = 2.25, solver: str = 'glpk')
Pyomo-backed Markowitz portfolio.
- Variables:
_model (Pyomo model) – Pyomo model
solver (str) – optimization solver in the background
num_assets (int) – number of assets
covariance (numpy.ndarray) – covariance matrix of the returns
risk_level (float) – risk level
- __init__(num_assets: int, covariance: np.ndarray, gamma: float = 2.25, solver: str = 'glpk') None
- Parameters:
num_assets – number of assets
covariance – covariance matrix of the returns
gamma – risk level parameter
solver – optimization solver in the background
- property num_cost: int
number of costs to be predicted
- setObj(c: np.ndarray | torch.Tensor | list) None
A method to set the objective function
- Parameters:
c – cost of objective function
Example:
import pyepo
import numpy as np
import random
m = 50 # number of assets
cov = np.cov(np.random.randn(10, m), rowvar=False)
# pick a backend (default = GurobiPy)
optmodel = pyepo.model.grb.portfolioModel(m, cov)
# alternatives:
# optmodel = pyepo.model.copt.portfolioModel(m, cov)
# optmodel = pyepo.model.omo.portfolioModel(m, cov, solver="gurobi")
revenue = [random.random() for _ in range(optmodel.num_cost)]
optmodel.setObj(revenue)
sol, obj = optmodel.solve()